

 QQ
QQ

2. 运动时,J3电机带动J3连杆。3轴,J3连杆,上臂和后端连杆构成如图的平行四边形结构。
3. 所以,若2轴电机转动,但3轴电机不转动,此时3轴和大臂的夹角会变化(没有连杆的机器人,2轴电机转动,3轴电机不转动,3轴和大臂夹角不会变化)


以上两幅图片,3轴均为0度,但由于2轴转动,3轴与大臂夹角不一样
4. 对于不带连杆的机器人正运动学,可以通过dh参数转化为各个轴的位姿矩阵,将6个位姿矩阵右乘即可得到当前机器人末端的笛卡尔坐标,具体参见 机器人如何从各轴角度算出当前XYZ
5. 但对于带连杆机器人,2轴的变化会导致3轴与大臂夹角发生变化。由于平行四边形结构的缘故,实质3轴与大臂夹角变化刚好等于2轴变化角度的负数。
6. 故在位姿矩阵右乘时,只需在右乘到轴3 矩阵后,再右乘一个旋转矩阵,将夹角补偿回来即可。
7. 1410机器人DH参数如下

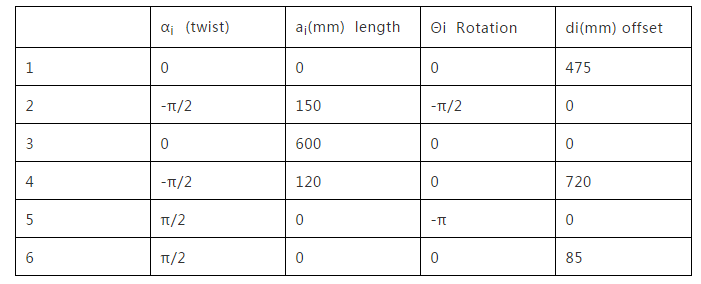
8. 针对1410类似带连杆机器人,机器人正运动学RAPID实现方法如下
LOCALVAR num alpha{6}:=[0,-90,0,-90,90,90];
LOCALVAR num a{6}:=[0,150,600,120,0,0];
LOCALVAR num theta{6}:=[0,-90,0,0,-180,0];
LOCALVAR num d{6}:=[475,0,0,720,0,85];
!1410 机器人DH参数
VAR num no_dependent;
!3轴与大臂夹角
PROC test_dh_pose()
VAR num curr_angle{6}:=[0,0,0,0,0,0];
VAR pose pose10{6};
VAR pose pose_cal:=[[0,0,0],[1,0,0,0]];
VAR jointtarget jtmp;
jtmp:=CJointT();
curr_angle{1}:=jtmp.robax.rax_1;
curr_angle{2}:=jtmp.robax.rax_2;
curr_angle{3}:=jtmp.robax.rax_3;
curr_angle{4}:=jtmp.robax.rax_4;
curr_angle{5}:=jtmp.robax.rax_5;
curr_angle{6}:=jtmp.robax.rax_6;
FOR i FROM 1 TO 6 DO
IF i=3 THEN
no_dependent:=-curr_angle{2};
!夹角等于2轴运动的负数
endif
pose10{i}:=f_dh2pose(i,alpha{i},a{i},theta{i}+curr_angle{i},d{i});
ENDFOR
FOR i FROM 1 TO 6 DO
pose_cal:=PoseMult(pose_cal,pose10{i});
ENDFOR
ENDPROC
FUNC pose f_dh2pose(num i,num alpha,num a,num theta,num d)
VAR pose pose1:=[[0,0,0],[1,0,0,0]];
pose1:=PoseMult(pose1,[[0,0,0],orientzyx(0,0,alpha)]);
pose1:=PoseMult(pose1,[[a,0,0],orientzyx(0,0,0)]);
pose1:=PoseMult(pose1,[[0,0,0],orientzyx(theta,0,0)]);
pose1:=PoseMult(pose1,[[0,0,d],orientzyx(0,0,0)]);
IF i=3 THEN
pose1:=PoseMult(pose1,[[0,0,0],orientzyx(no_dependent,0,0)]);
endif
!针对轴3坐标系,需要再多乘一次旋转,将夹角补偿回来
RETURN pose1;
ENDFUNC
