

 QQ
QQ

编写程序时,逻辑指令很重要,也是必不可少的。它们在工业机器人编程或其他编程语言中基本相同。对于初学者,请分别理解两条重复的循环逻辑指令,为编写程序奠定基础。
1. WHILE指令
1、WHILE指令结构定义
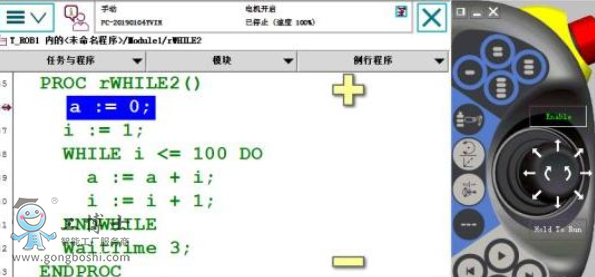
2、WHILE举例说明
3、WHILE无限循环
2. FOR指令
1、FOR指令结构定义
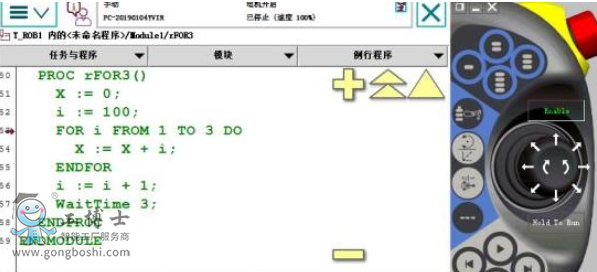
2、FOR举例说明
3、FOR指令要点
4、FOR指令变量i的举例说明

(一)ABB机器人直线上到某点指定距离的点位如何计算

1. 已知点Curr和点Refer,点Curr和点Refer构成直线,方向由Curr指向Refer
2. 要求Result点距离Curr为指定距离,且Result在直线Curr_Refer上,如何计算Result点位置
3. 可以计算Curr到Refer的距离,根据要求的Result到Curr的距离和Curr到Refer距离的倍率,计算Result的位置
4. 代码如下:
FUNC robtarget GetTracePoint(robtarget Current,robtarget Refer,num Dist)
!line direction: Current to Refer
!Dist: distance between Current and Return position
VAR num dis_tmp;
VAR num dx;
VAR num dy;
VAR num dz;
VAR num ratio;
VAR robtarget pResult:=[[0,0,0],[1,0,0,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
pResult:=Current;
dx:=Refer.trans.x-Current.trans.x;
dy:=Refer.trans.y-Current.trans.y;
dz:=Refer.trans.z-Current.trans.z;
dis_tmp:=distance(Current.trans,Refer.trans);
ratio:=Dist/dis_tmp;
pResult.trans.x:=Current.trans.x+ratio*dx;
pResult.trans.y:=Current.trans.y+ratio*dy;
pResult.trans.z:=Current.trans.z+ratio*dz;
RETURN pResult;
endfunc
(二)ABB机器人平移指令

1、现场机器人在wobj0下有轨迹path_0,现在希望实际运行的时候,轨迹能整体沿着wobj0的x和y方向各偏移30mm,如何***快速实现?
2. 安川机器人有平移指令SFTON,使用如下:
SFTON P003 RF
//基于机器人坐标系平移p003,p003中设置平移的xyz数值
//以下轨迹均基于RF平移p003
MOVL V=290.0
MOVL V=290.0
MOVL V=290.0
SFTOF
//关闭平移
3. 对应ABB机器人RAPID指令为:PDISPSET pose100,其中pose100为pose类型数据,包括trans(xyz)和rot(q1-q4)。Pdispset的偏移和旋转均基于当前使用坐标系,即对于当前坐标系的右乘。
VAR posepose500:=[[0,0,0],[1,0,0,0]];
PROC main()
path_t1;
!原始轨迹
pose500.trans:=[30,30,0];
!设置pose500数据的xyz
PDispSet pose500;
!以下轨迹基于当前轨迹使用的坐标系偏移pose500
path_t1;
PDispOff;
!关闭偏移
ENDPROC
PROC path_t1()
reg1:=100;
MoveLp500,v100,fine,tWeldGun\WObj:=wobj0;
MoveLoffs(p500,reg1,0,0),v100,fine,tWeldGun\WObj:=wobj0;
MoveLoffs(p500,reg1,reg1,0),v100,fine,tWeldGun\WObj:=wobj0;
MoveLoffs(p500,0,reg1,0),v100,fine,tWeldGun\WObj:=wobj0;
MoveLp500,v100,fine,tWeldGun\WObj:=wobj0;
ENDPROC
4. 若机器人轨迹参考wobj1,wobj1不与wobj0平行,则使用pdispset后,轨迹偏移如下图,即偏移参考wobj1的方向。

- 下一篇:ABB机器人的数据备份与恢复如何操作?
- 上一篇:工业机器人的安装调试的13个步骤
